TRAINII
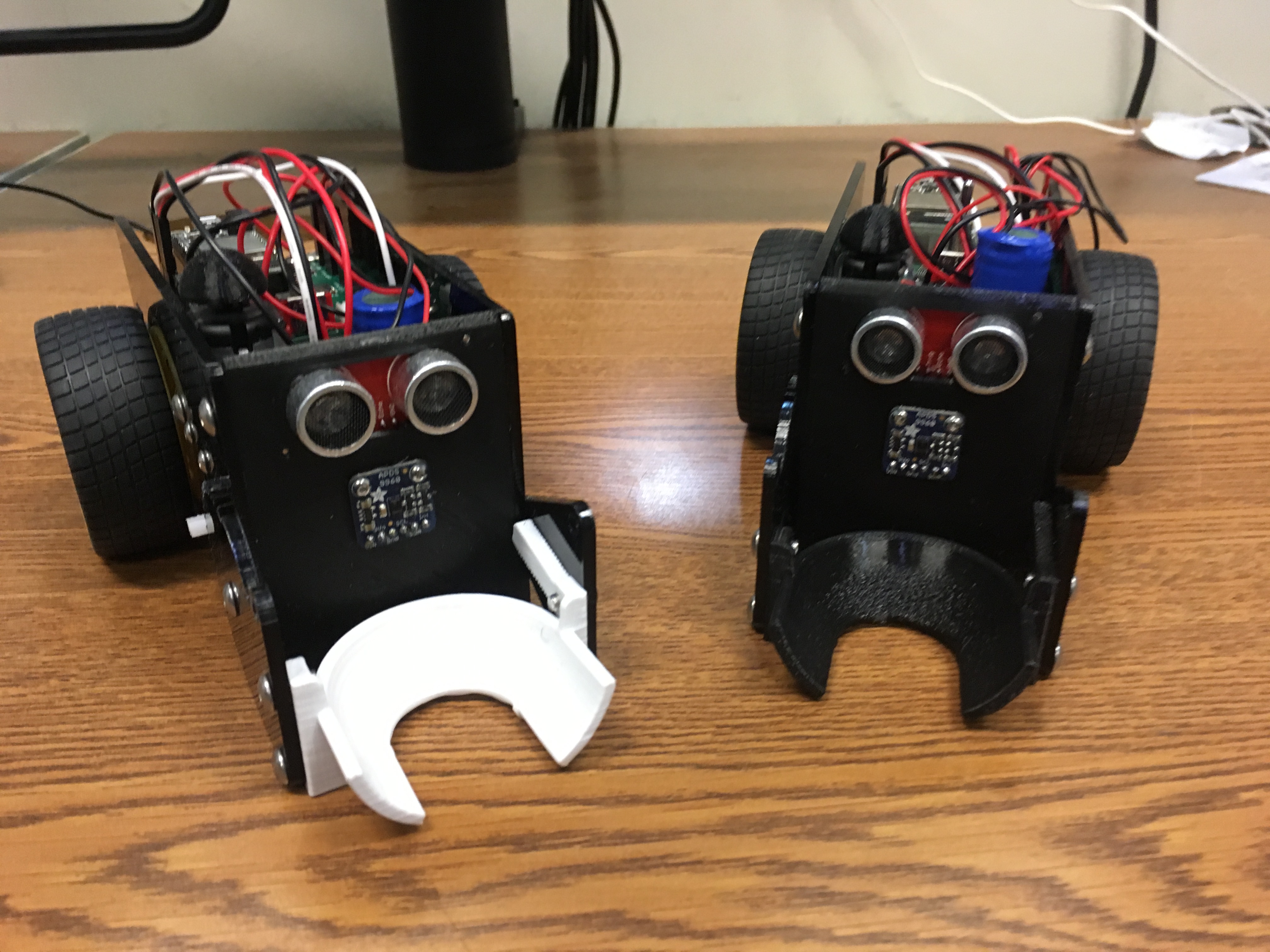
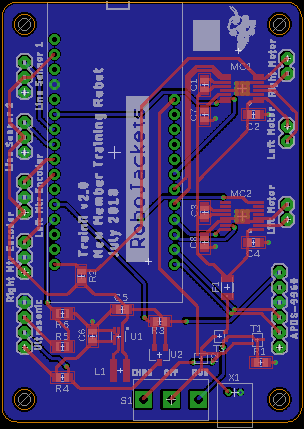
Trainii was the first iteration of training robots for RoboJackets that I worked on, designed for the C++ software training program. I focused on the electrical design of the robot, designing/manufacturing/verifying the main control board. The brains of the robot is an Adafruit HUZZAH32, which itself is based on WROOM32 ESP32 module. The actuators include two drive motors for navigating and a motor for the plow on the front, all driven by motor driver circuits. The sensors include a gesture sensor, ultrasonic distance sensor, 2x line sensors, and 2x hall effect sensors. The chassis was laser cut from acrylic and 3D printed, making a relatively cheap, easy to use platform.