Rigatoni was the third self-driving car project I worked on as part of RoboJackets. I served as one of the main system architech
advisors and worked on electrical system design.
Rigatoni was designed for entry to the autonomous division of evGrand Prix.
The goal of the competition is to have multiple autonomous go-karts racing around a track, aiming for speeds of +30 mph.
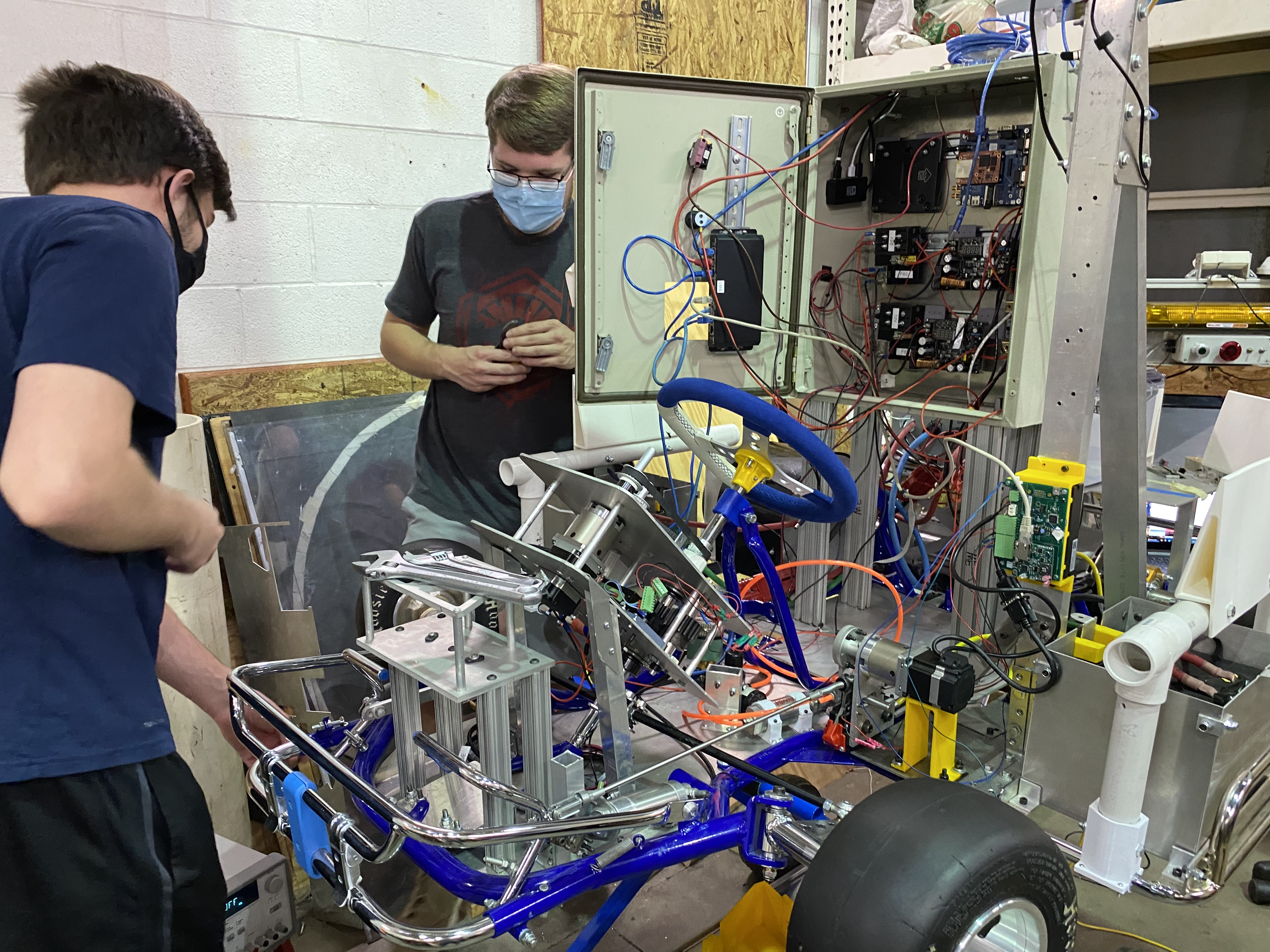
The chasis is the TopKart MSTEM3, designed primarily for manual electric kart racing. The
kit standardizes the drive motor (Motenergy ME0708 PMDC Motor), motor controller (Alltrax SPM-48300), batteries (4x 12V lead acid) with
the goal of the competition being focused on the autonomous race elements.
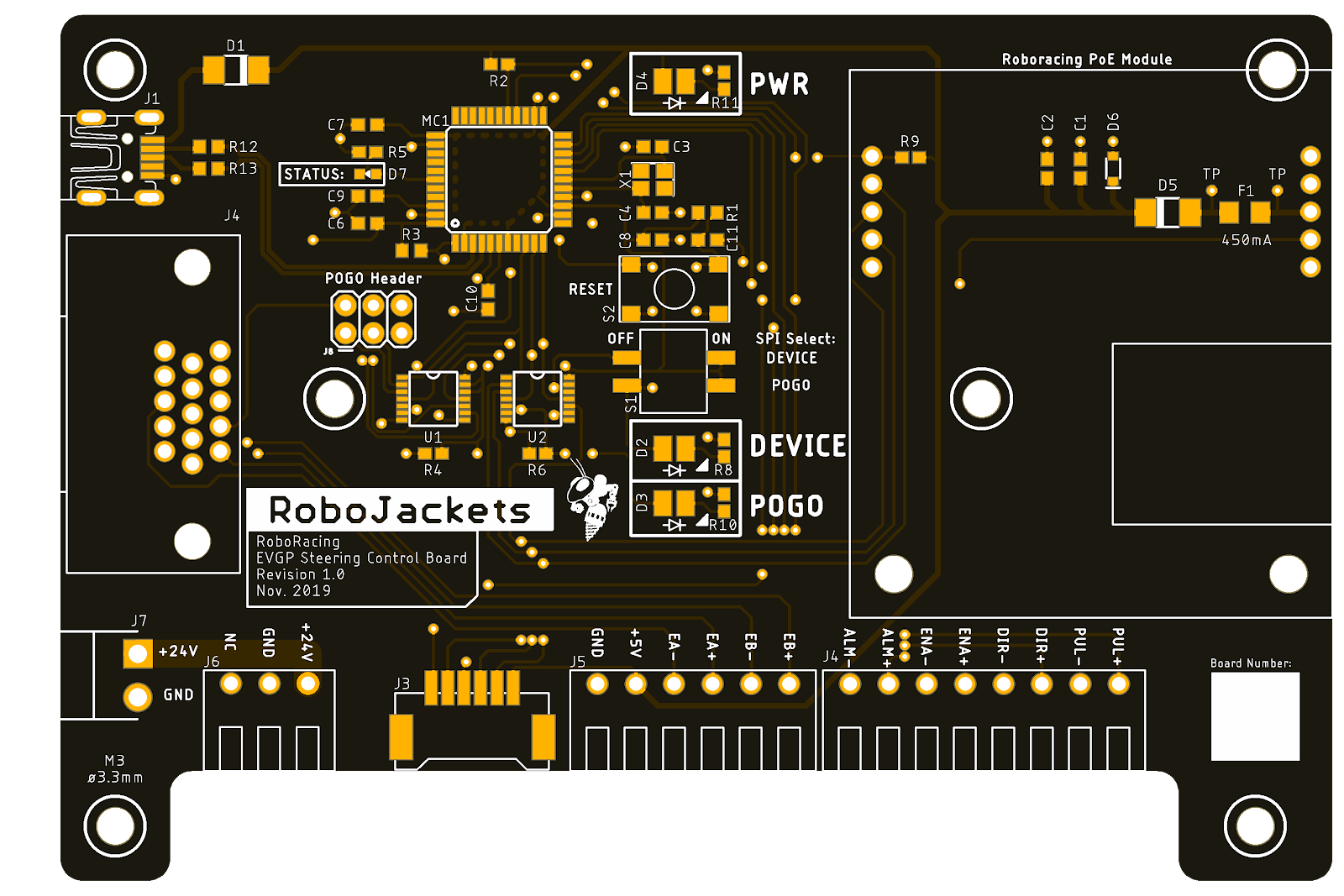
Each subsystem has a dedicated control board: steering, braking, drive, manual, and e-stop. A microcontroller (Atmega32u4)
controls the functionality of each subsystem. They all communicate with the main control PC (Intel NUC) over a passive Power over
Ethernet (PoE) system. This greatly simplifies wiring complexity and allows easy interchangability and replacement. Steering occurs with a
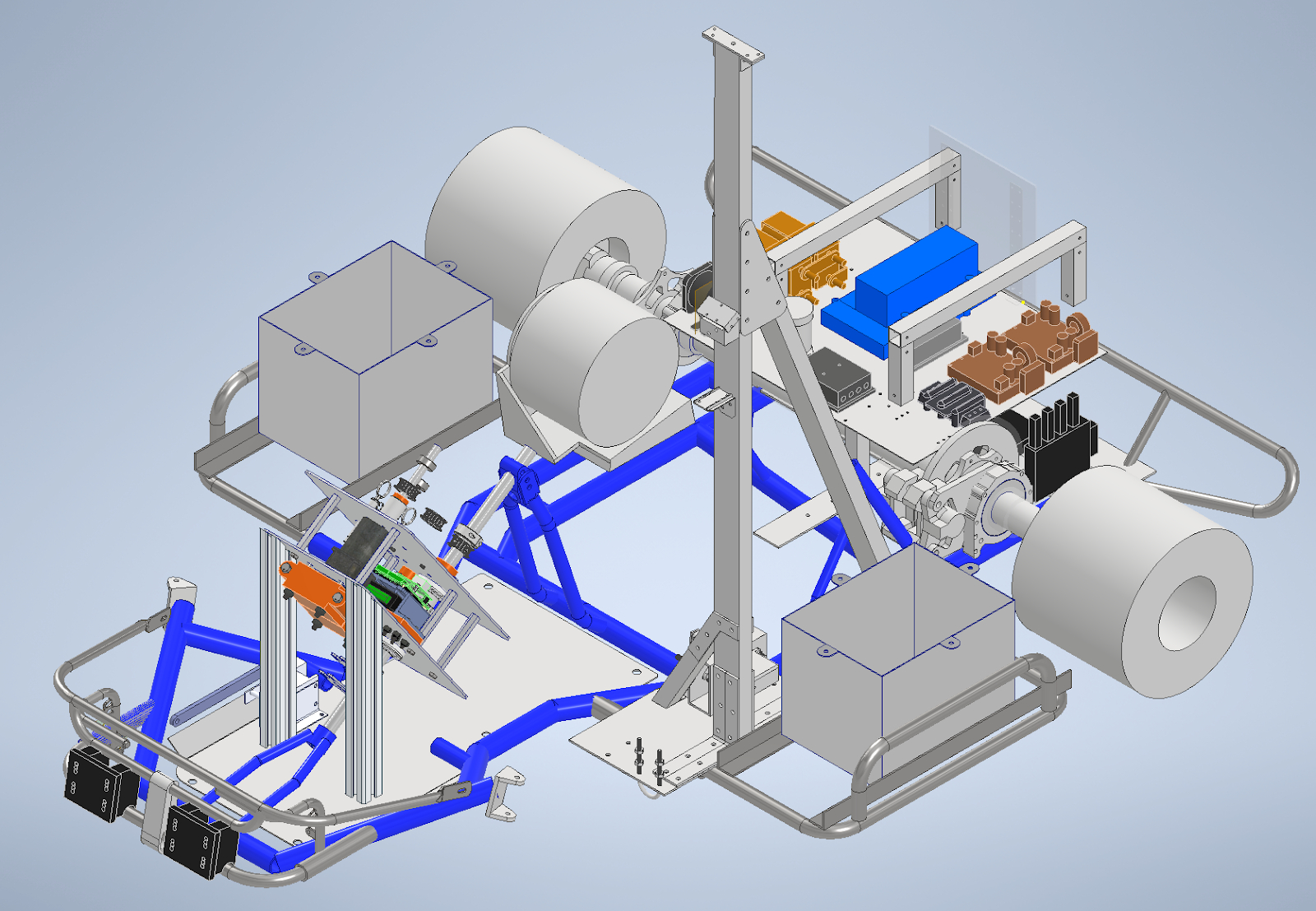
stepper motor-driven assembly, allowing for disconnection of the motor for hand steering. A stepper also actuates the existing
hydraulic braking system, allowing for finer speed control. The drive system has a state-space model that measures linear speed with a
rotary encoder and motor current measurement to ensure the car travels at the commanded speed. The manual remote allows for RC control
of the robot along with toggling autonomous mode. The e-stop combines a streaming wireless kill switch and on-board kill functionality to
permantly disable the robot with physical reboot being required while also using a stack light to indicate state and a solenoid to apply the brakes.
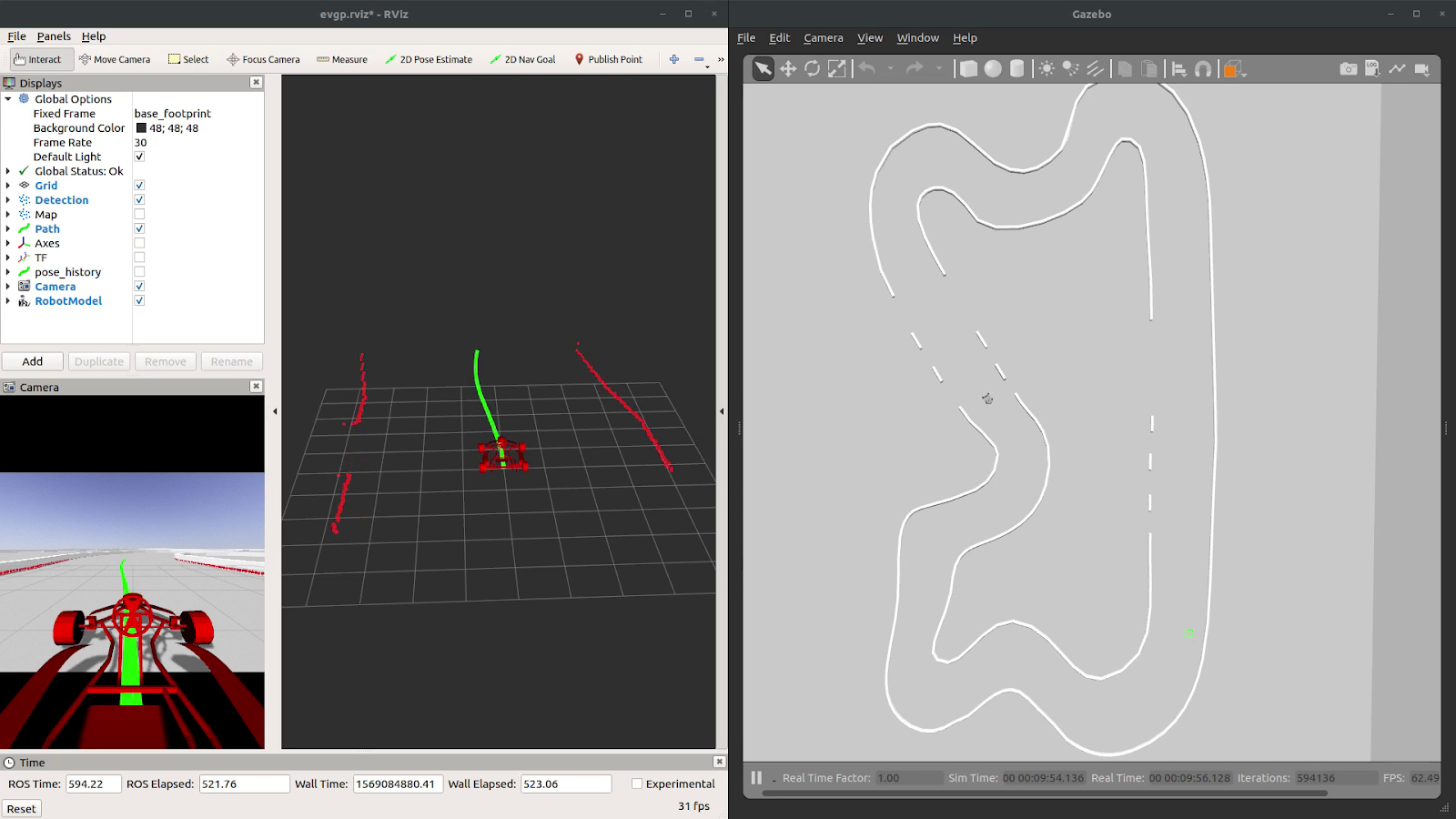
The sensing system includes multiple cameras, a lidar (Velodyne Puck), two IMUs (Yost Labs 3-Space), a RTK GPS (Swift Navigation Piksi Multi), and radar.
The main control PC runs ROS to perform sensor fusion, localization, planning, and control.
evGrand Prix Autonmous 2021 - coming soon