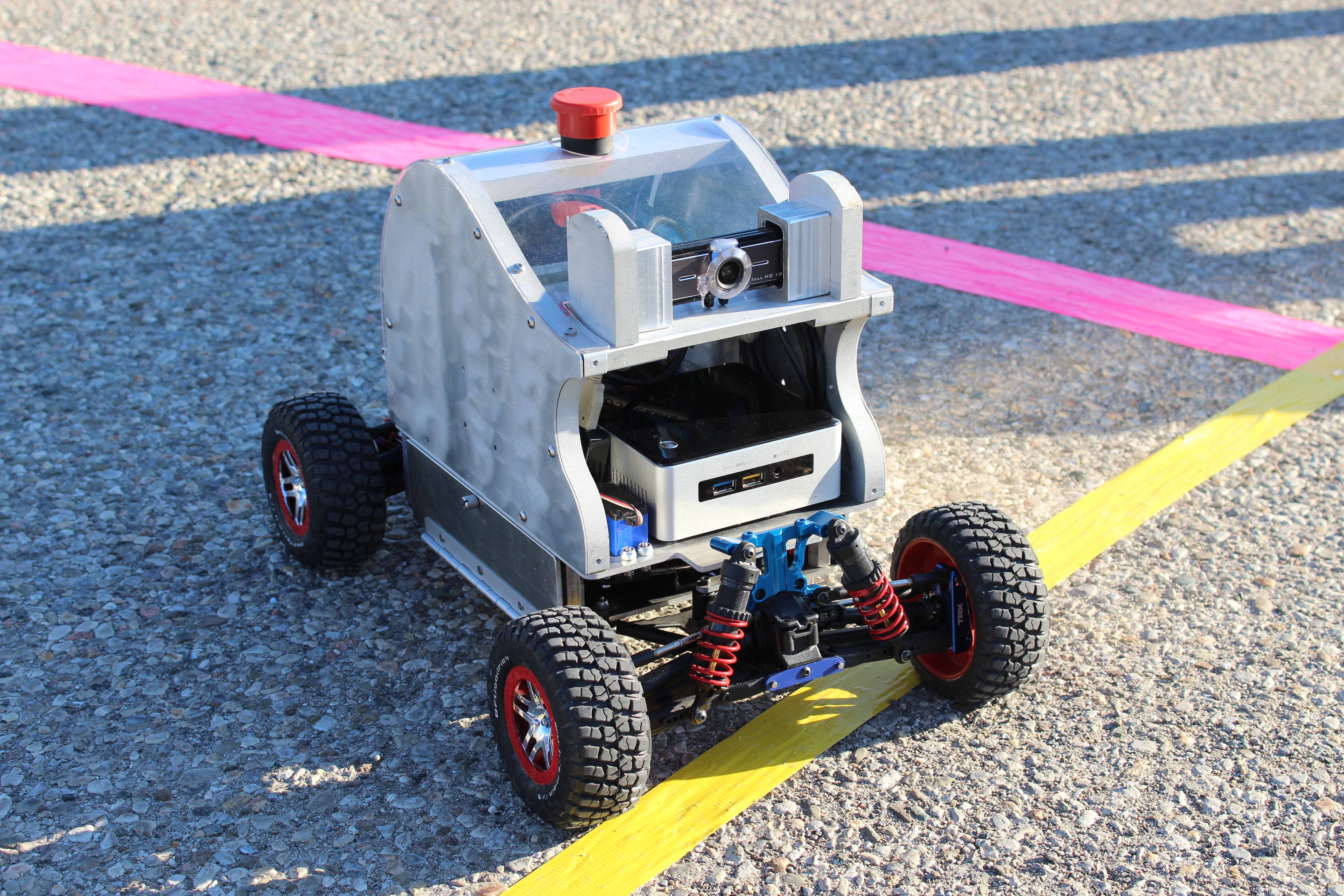
Macaroni was the first self-driving car project I worked on as a part of RoboJackets. Many of the frame elements are sourced from a 1/10th scale Traxxas Slash 4x4 RC car.
I primarily worked on the emergency stop system, which included a remote pushbutton system. The wireless module system would allow the car to start and stop. Additionally, I helped with the routing of the car control board. The board initially was an interface board with an Intel Joule, a since discontinued slim form-factor computer designed for IoT. The control board would handle commands sent from the computing system and turn that in to throttle, being a PWM signal to a Traxxas ESC, and steering, being a PWM signal to a servo. The wireless module would also interface with this system. Additionally, the car was capable of being remotely controlled with the original RC remote or from software commands from the computer.
Due to poor documentation and eventual discontinuation of the product, the Intel Joule system was eventually switched to an Intel NUC and Arduino with similar functionality. The Intel NUC, while a stable and safe computing platform, was heavier and larger than the original Joule system. Due to the additional weight from the NUC, the original motor specifications were not sufficient for moving the car appropriately, causing the brushless motor to slip significantly. The larger NUC also immediately reduced the effective mounting space inside of the main cabin of the robot. Because of these limitations, maintenance and further development of Macaroni was greatly reduced to focus primarily on the new "small car" Sedani and "big car" Bigoli (see above).
IARRC 2017 - 3rd Place
Sparkfun AVC 2017 - 3rd Place
IARRC 2018 - Backup for Sedani
Sparkfun AVC 2018 - Backup for Sedani