BIGOLI
Bigoli was the first self-driving car project where I was the lead electrical engineer. The goal of the project was to be able to carry a human passenger while autonomously navigating a course. The emphasis is on relatively smooth controls, enforced with the human passenger having to carry a water cup and shoot a foam dart gun at targets during the competition
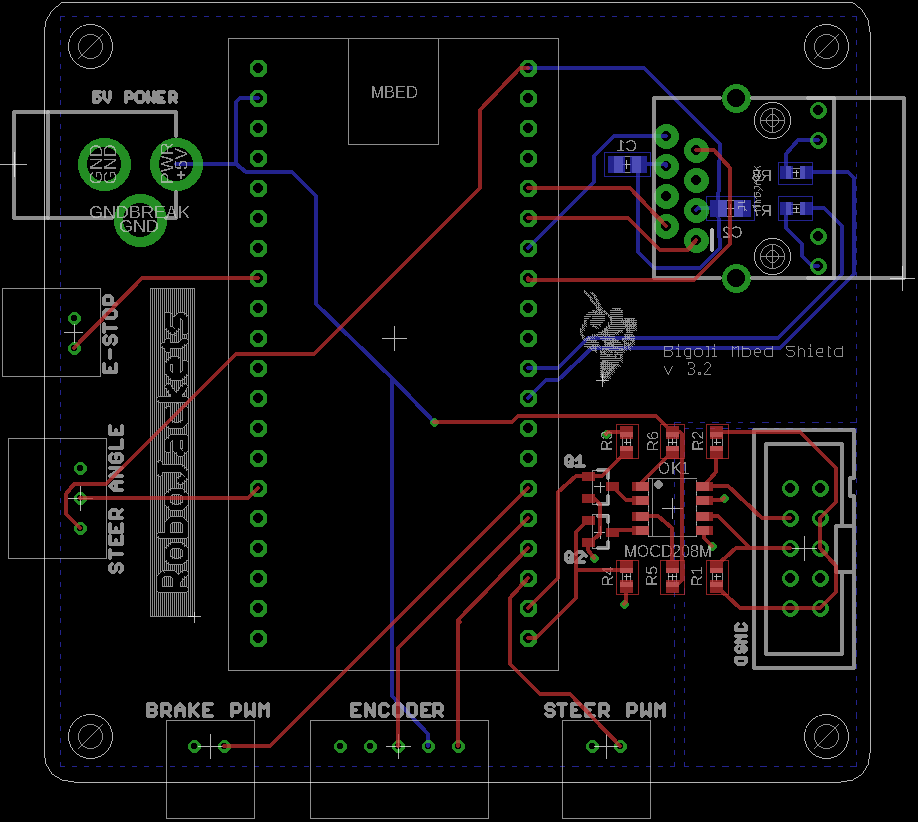
I designed the power system, drive system, and steering system. The whole system is powered by two 12V batteries, running at a total of 24V. The drive motor used is designed for a scooter, with a custom designed gear box attached. The motor is controlled by the Open Source Motor Controller (OSMC). The steering motor was CIM motor controlled by the Talon SRX with position monitored by a potentiometer. A custom control PCB was created using the mbed LPC1768 as the base to actuate the steering and drive. The safety system is implemented using a solenoid contractors system that cuts power to both motors utilizing on-board safety pushbuttons or the wireless remote. An Intel NUC provide high-level computation utilizing a SICK Lidar and multiple cameras for object avoidance, detection, and planning.
Bigoli primarily competed at the Sparkfun AVC competition. I was able to ride as the passenger for both competition years. Due to the cancelation of the Sparkfun AVC 2019 event, the project was discontinued.
Sparkfun AVC 2017 - 1st Place
Sparkfun AVC 2018 - DNS